折纸机器人多功能金属骨架
1、 折纸机器人可以通过紧密集成驱动、传感和通信功能而形成。然而,这项任务具有挑战性,因为用于设计这种机器人的传统材料(包括塑料和纸张)将限制额外的功能。为了在系统中安装多功能系统,科学家通常必须包括增加机器人重量的外部电子设备。在最近发表在《科学机器人》杂志上的一项研究中,杨海涛和他的同事在美国和新加坡的化学和生物分子工程、生物医学工程以及电气和计算机工程的跨学科部门开发了一种氧化石墨烯(GO)模板合成工艺,以生产可重构、兼容和多功能的金属骨架。主干构成折纸机器人的基础,内置应变传感和无线通信功能。使用GO方法,研究人员形成了一个复杂的贵金属原型,作为纸模板的结构副本。
2、 研究团队可以重现铂金折纸结构,这种结构由薄弹性体制成,可以形成多功能骨骼,从而创造出一种新的折纸机器人。这种新型机器人比其他材料制成的机器人更易变形、更阻燃、更省电。Yang等人观察到新的铂机器人(Pt机器人)的附加功能,包括按需电阻加热、应变传感和内置天线,无需外部电子设备。对于其他功能,它们包括机器人运动的实时监控或记录、机器人之间的无线通信、热调节和磁控制。新的工作丰富了机器人素材库,设计了多功能软机器人。
3、 机器人研究人员此前探索了古代日本的折纸艺术,以设计人造肌肉、自动折叠机、弹簧折纸系统和机器人变形。通常,他们用纤维素纸聚酯、聚醚醚酮和聚四氟乙烯来制造这些发明的骨架。尽管提供了机械支撑,但纸或塑料骨架缺乏刺激响应、传感和无线通信功能。研究团队的目标是为紧密集成开发多功能软机器人的主干,而不是安装外部设备来提供这些功能。研究没有证明这种原型软机器人具有导电折纸骨架,具有传感和通信的潜力。因此,科学家们热衷于开发一种新的制造方案来生产机械稳定、柔软和导电的机器人骨架。
4、 在制造过程中,使用氧化石墨烯(GO)多层嵌入各种金属离子前驱体,然后进行高温退火和煅烧,产生高维GO结构。金属氧化物复制品包括微结构、独立链和复杂折纸结构,具有优异的化学控制和结构复制能力。所提出的GO推导方法将为生产复杂金属结构作为软机器人的多功能骨架提供一个新的平台。
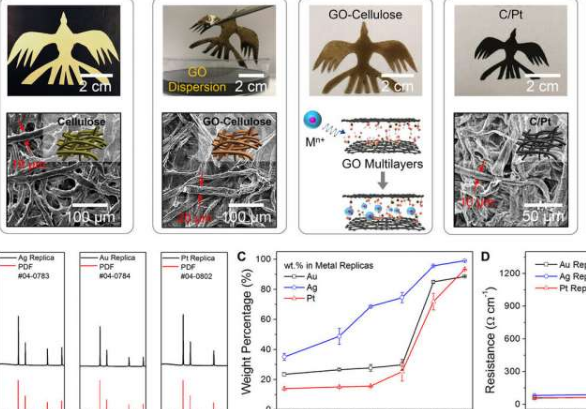
5、 使用GO支持的模板技术将纤维素纸薄膜或折纸形状转换为各种金属复制品。他们在制造过程中遵循四个主要步骤,从凤凰形状的模板开始,形成贵金属盐(锰)-插层GO-纤维素复合物(M-GO-纤维素)。在制造过程中,获得的金属复制品经过进一步的退火和煅烧,研究小组通过调节它们的煅烧温度来控制它们。科学家们通过将各种3D折纸结构从纤维素纸转换成铂金,创造出了复杂的金属折纸结构,如六边形蜂窝、青蛙、花朵、恐龙、飞机和风箱等。
6、 为了提高机械稳定性,他们在金属折纸结构中添加了一种薄弹性体,以实现巨大的可变形性和可逆重建。杨等与金(Au)或银(Ag)相比,具有结构保存效率高、机械柔性高、导电性高等优点,因此选用铂金属。团队优化了Pt-弹性体骨架的高导电性和机械柔性,使得得到的平面Pt-弹性体复合材料能够承受大的反复变形,是柔软机器人骨架的理想选择。可重构金属骨架引入了许多不同的功能,形成超材料折纸机器人,包括固有的耐火潜力。研究团队允许机器人的Pt长时间保持暴露状态(0下该功能的800火焰直接接触测试30秒),纸机器人在数秒内(不到5秒)点燃。
7、 铂弹性体骨架比纤维素纸机器人更薄更轻,但在可逆机器人驱动过程中保持机械稳定性。纸质机器人需要较大的压力变化才能伸展或收缩;而Pt机器人只需要低压变化。杨等开发了一种导电Pt折纸机器人,用于发送和接收电磁波,并作为可重构天线用于无线通信。在制造之前,研究团队模拟三维辐射模式,探索Pt机器人作为辐射天线的用途,然后制造它们。科学家还演示了两个Pt机器人之间作为发射器和接收器的无线通信。当发送机器人发送不同频率的脉冲信号时,接收机器人待机1。
8、 该团队比较了五种工作中的机器人的特性,展示了使用GO的Pt金属骨架相对于(1)骨架密度、(2)机械刚度、(3)能量效率、(4)应变传感能力和(5)无线通信能力的技术优势。研究团队进一步优化了两个用于无线通信的Pt机器人,其中发送方机器人通过无线方式向接收方机器人提供导航指令,通过遵循引导路径成功绕过工程障碍。
9、 该团队随后通过使用添加式三维制造扩展了该系统的应用,其中他们将Pt-Go-纤维素墨水与熔融沉积成型(FDM)相结合,以3D打印金属机器人骨架成型形状。然后,他们设计了一个Pt机器人来远程控制磁场。为此,杨等用铂-氧化铟锡-纤维素墨水合成了铂复制品,并用磁性粒子浸润聚合物溶液以产生磁性铂骨架。新结构包含通常内置的应变传感和无线通信功能,并增加了磁运动。磁性铂机器人可以在磁激励下经历可逆的形状和体积变换,以向前移动并与旋转磁场对齐。
10、 通过这种方式,杨海涛和他的同事开发了一个Go使能的模板合成协议,用于生产可重构、兼容和多功能的金属骨架,以构建金属折纸机器人。该机器人包括内置的应变传感和无线通信。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
昌河北斗星X5试驾,简单几步,开启完美试驾之旅。首先,预约试驾,通过官网或4S店轻松完成;其次,到店后由专...浏览全文>>
-
北汽制造勇士试驾预约,是体验这款硬派越野车型的重要环节。4S店提供便捷的线上预约服务,用户可通过官网或电...浏览全文>>
-
极狐阿尔法T6试驾,开启完美驾驭之旅。外观设计动感时尚,线条流畅,充满未来感。内饰豪华舒适,科技感十足,...浏览全文>>
-
长安欧尚520试驾操作指南:1 启动车辆:插入智能钥匙,踩下刹车,按下启动按钮。2 选择驾驶模式:通过中...浏览全文>>
-
试驾五菱凯捷可通过以下几种途径:1 4S店试驾:前往当地五菱汽车授权经销商,直接预约试驾服务,专业销售顾...浏览全文>>
-
MINI试驾线上+线下操作指南线上预约:访问MINI官网或官方APP,选择“试驾预约”,填写个人信息、车型偏好及时...浏览全文>>
-
力帆预约试驾,一键搞定,开启豪华驾驶之旅。只需简单几步,即可在线预约心仪车型的试驾体验,省时又便捷。无...浏览全文>>
-
SONGSAN MOTORS试驾预约,开启非凡驾驶之旅!我们为您精心准备了多款高性能车型,无论您是追求速度的激情玩家...浏览全文>>
-
欧拉试驾预约,轻松几步,畅享豪华驾乘。只需三步,即可开启您的专属体验:第一步,访问欧拉官网或官方APP,点...浏览全文>>
-
MINI试驾,线上+线下操作指南线上预约:访问MINI官网或官方APP,选择“试驾预约”,填写个人信息、车型偏好及...浏览全文>>
- 北汽制造勇士试驾预约,4S店的贴心服务与流程
- MINI试驾,线上+线下操作指南
- 零跑汽车试驾,如何在4S店快速预约?
- 试驾MG4 EV全攻略
- 长安欧尚520试驾操作指南
- IPHONE 17 系列或将提供高达 35W 的有线充电
- OPPO FIND N5 推出迄今为止最薄的可折叠智能手机
- IPHONE 上的 CHROME 和 GOOGLE APPS 正在使用 CIRCLE 进行搜索
- OPPO 推出 WATCH X2
- NOTHING PHONE在 3 月 4 日发布前的完整详细信息
- Nintendo Switch 2 渲染图显示其支架经过重新设计,拥有新按钮,但缺少一个插槽Nintendo Switch 2 渲染图显示其支架经过重新设计 拥有新按钮
- 据传卡西欧 CRW-001 新款金色戒指手表即将上市
- FPGA 游戏机的灵感来自 PS One 起价 149 美元
- 伊利诺伊州住房市场在利率上升的情况下保持稳定
- Realme 14x 5G 搭载联发科 Dimensity 6300 SoC
- 三星 Galaxy S25 Ultra 渲染图泄露 显示圆角设计
- 预计三星 Galaxy S25 Ultra 的边框将比其前代产品更薄
- 三星 Galaxy Unpacked 2025 或将于 1 月 22 日举行
- Rivian 通过假日更新推出 Google Cast 支持
- 圣诞老人的房子在房地产网站上挂牌出售 估价 120 万美元